Description
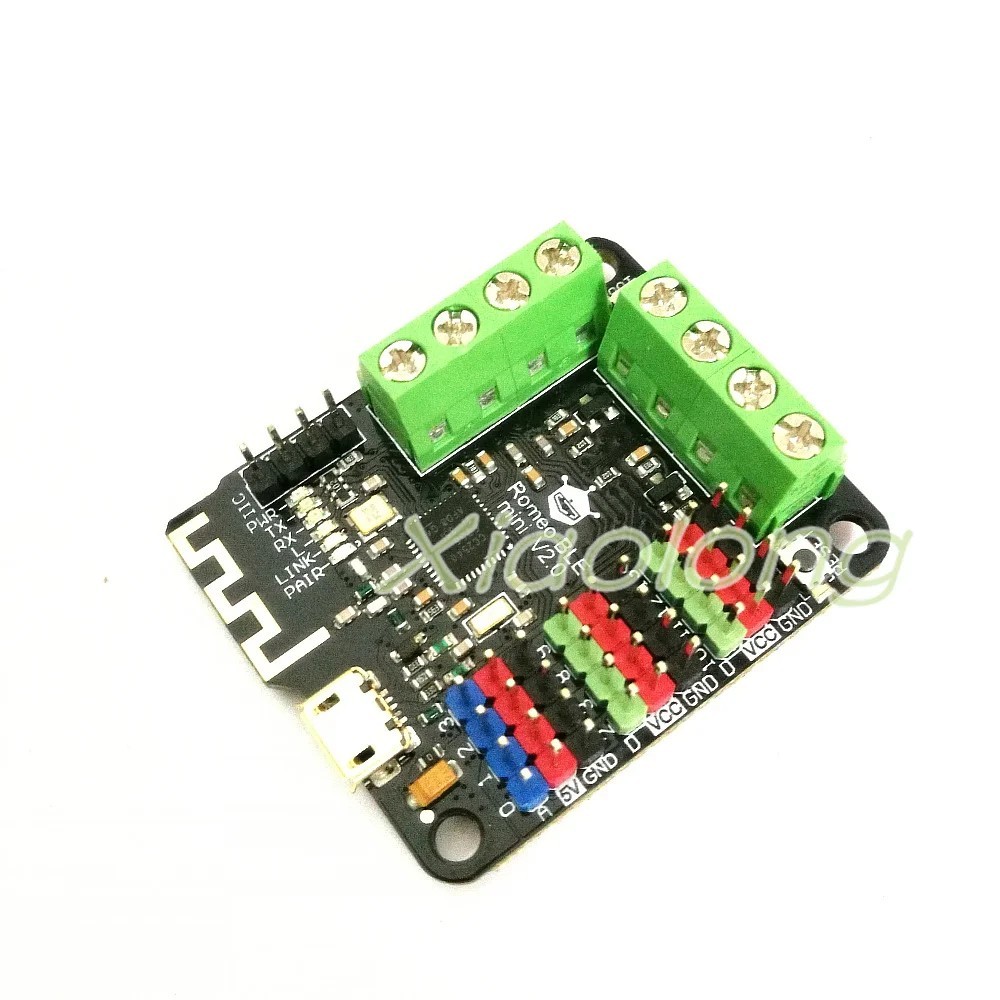
Romeo BLE Mini robot controller is a mini version of Romeo BLE. It has an ATmega328p Arduino UNO main control chip on board. It has two 1.2A motors (peak value 3.2A). It can drive N20 metal deceleration motor and ordinary 130 motor. It is very suitable for desktop micro-robot design. In addition, Romeo BLE MINI has 8 digital interfaces and 4 analog interfaces. Each interface is compatible with Gravity-3Pin standard and can be connected with various Gravity sensor modules. The interface can supply power through the power supply port of the steering gear, which can provide stable power supply for the steering gear and other large current equipment, and can satisfy the two control schemes of the robot motor and the steering gear.
Romeo BLE Mini integrates a CC2540 Bluetooth 4.0 communication chip to support downloading code through Bluetooth and establishing communication with robots. The robot can also be remotely controlled by mobile APP.
Update logs: Romeo BLE Mini V2.0
1. Replacement of motor drive, HR8833 - > TB6612FNG, compatible with Romeo L298 motor drive control logic
2. Replacement of pin layout leads to Arduino Uno (ATmega328p) D 2 &, D3 interruption pin, which can be connected with an external encoder.
Characteristic:
Support Gravity sensor interface, color identification, convenient direct insertion steering gear and Gravity series sensor module.
Support automatic switching of external power supply, USB and external power supply can be connected at the same time.
Supporting wireless downloader/wireless communication functions
Support for mobile app control, all source code open source
2-way H-bridge motor drive
Supporting external power input of steering gear
Support AT Instruction Configuration BLE
Support Serial Pass-through
Support master-slave switching
BLE chip: TI CC2540
Transmission Distance: Open Zone 30m
Microprocessor: ATmega328P
Board Selection: Arduino UNO
Flash memory: 32 KB (ATmega328P) of which 0.5 KB was used by bootloader
SRAM2:KB (ATmega328P)
EEPROM: 1 KB (ATmega328P)
Clock frequency: 16 MHz
Digital pins: 8
PWM channel: 4 (D3 D9 D10 D11)
Simulated pin: 4
Output Current: 1.2A Single Channel Continuous Driving Current
Start/peak current: 2A (continuous pulse)/3.2A (single pulse)
Motor Drive Pin: D4 D5 D6 D7
MicroUSB interface
Having I2C interface
H-Bridge Motor Drive Interface with 2-way 3.2A Current
Size: 45x38.5mm