- -52%





4 csatornás 1.2A L293DD négymotoros meghajtó modul teljes híd meghajtó Mecanum Wheel Robot Car Arduino számára
4 csatornás 1.2A L293DD négymotoros meghajtó modul teljes híd meghajtó Mecanum Wheel Robot Car Arduino számára
548 Ft
52% megtakarítás
1 141 Ft
Nincs adó
Description
You can also buy the 360 Degree Omnidirectional 4WD Smart Robot Car Kit here ( link )
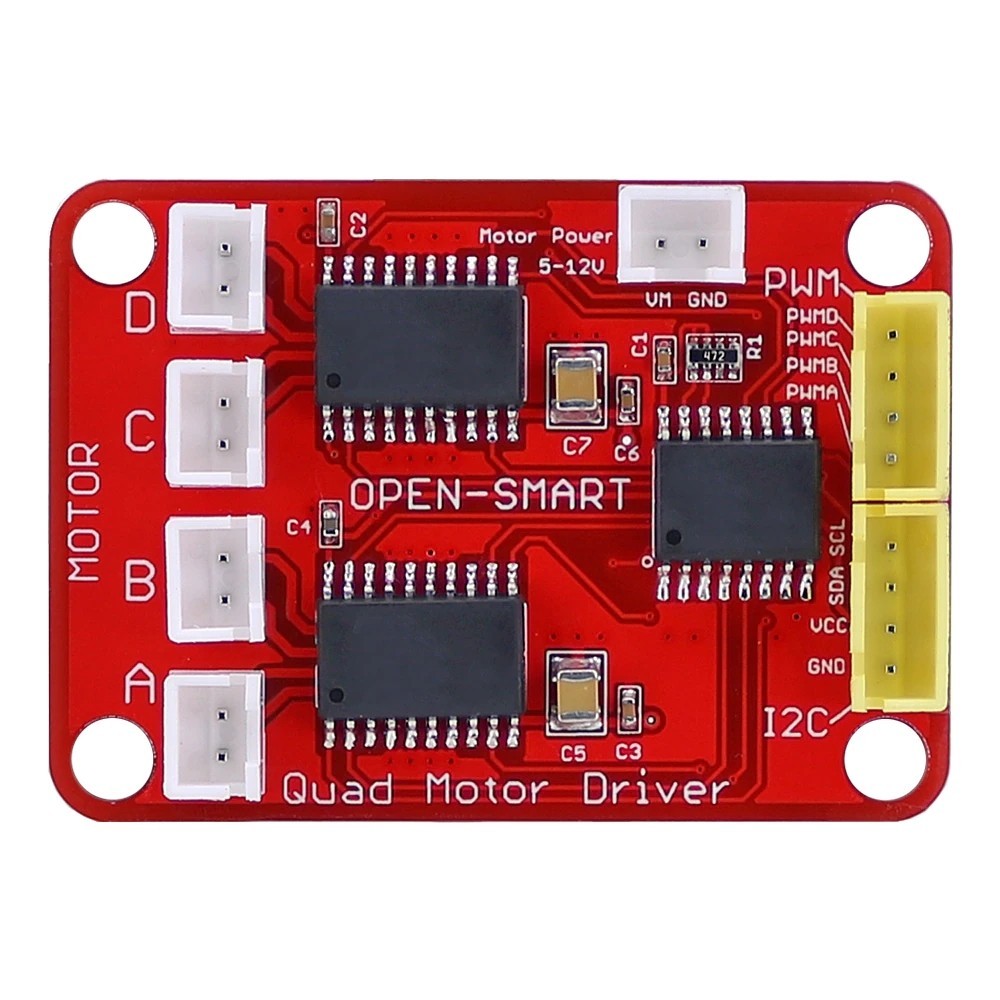
The quad motor driver can control up to four DC motors independently. It can drive 300mA(peak is 600mA) for each channel.
Use PCF8574T ( or PCF8574AT ) which is I2C to 8 bit pins converter to select the direction of the motors, and then you can control the speed of the motors via PWM pins. So you can control 4 DC motors independently with only 6 signal pins.
The four motor outputs (A / B / C / D) can be separately controlled, the speed of each motor is controlled via a PWM input signal with a frequency up to 5kHz. The motor and the external power supply interfaces use the XH2.54-2P socket.
Note: However, when using the board at current up to 1.2A, it may be necessary to improve thermal performance with a heat-sink.
Features:
- Driver Chip: PCF8574T ( or PCF8574AT ) and L293DD
- Power supply voltage: VM=12V max
- Logic voltage: VCC=4.5-5.5V
- Output current: for each Channel, Iout = 0.3A (average) / 0.6A (peak)
- CW/CCW/stop motor control modes
- Built-in thermal shutdown circuit and low voltage detecting circuit
- Input connector: 4pin headers with 2.54mm pitch
- Motor connector: XH2.54-2P socket
- Filtering capacitors on both supply lines
- Great for DIY and smart car projects
Photos
Part List(Schematics and program can be sent, Please contact us)
1 x module
Please Note That (Note: After you buy the product, the documents can be send, Please contact us)
You can also buy the 360 Degree Omnidirectional 4WD Smart Robot Car Kit here ( link )
The quad motor driver can control up to four DC motors independently. It can drive 300mA(peak is 600mA) for each channel.
Use PCF8574T ( or PCF8574AT ) which is I2C to 8 bit pins converter to select the direction of the motors, and then you can control the speed of the motors via PWM pins. So you can control 4 DC motors independently with only 6 signal pins.
The four motor outputs (A / B / C / D) can be separately controlled, the speed of each motor is controlled via a PWM input signal with a frequency up to 5kHz. The motor and the external power supply interfaces use the XH2.54-2P socket.
Note: However, when using the board at current up to 1.2A, it may be necessary to improve thermal performance with a heat-sink.
Features:
- Driver Chip: PCF8574T ( or PCF8574AT ) and L293DD
- Power supply voltage: VM=12V max
- Logic voltage: VCC=4.5-5.5V
- Output current: for each Channel, Iout = 0.3A (average) / 0.6A (peak)
- CW/CCW/stop motor control modes
- Built-in thermal shutdown circuit and low voltage detecting circuit
- Input connector: 4pin headers with 2.54mm pitch
- Motor connector: XH2.54-2P socket
- Filtering capacitors on both supply lines
- Great for DIY and smart car projects
Photos
Part List(Schematics and program can be sent, Please contact us)
1 x module
Please Note That (Note: After you buy the product, the documents can be send, Please contact us)

Szállításii feltételek

Biztonsági feltételek

Visszaküldési feltételek














