- -53%




6 tengelyes MPU6050 modul giroszkóp DMP motor Kalman szűrő gyorsulásmérő STM32 dőlésmérő kiegyensúlyozó jármű
6 tengelyes MPU6050 modul giroszkóp DMP motor Kalman szűrő gyorsulásmérő STM32 dőlésmérő kiegyensúlyozó jármű
463 Ft
53% megtakarítás
986 Ft
Nincs adó
Features:
1. The module integrates a posture solver, with a dynamic Kalman filter algorithm, can accurately output the current posture of the module in a dynamic environment, the posture measurement accuracy is 0.01 degrees, the stability is extremely high, and the performance is even better than some professional inclination angles. instrument!
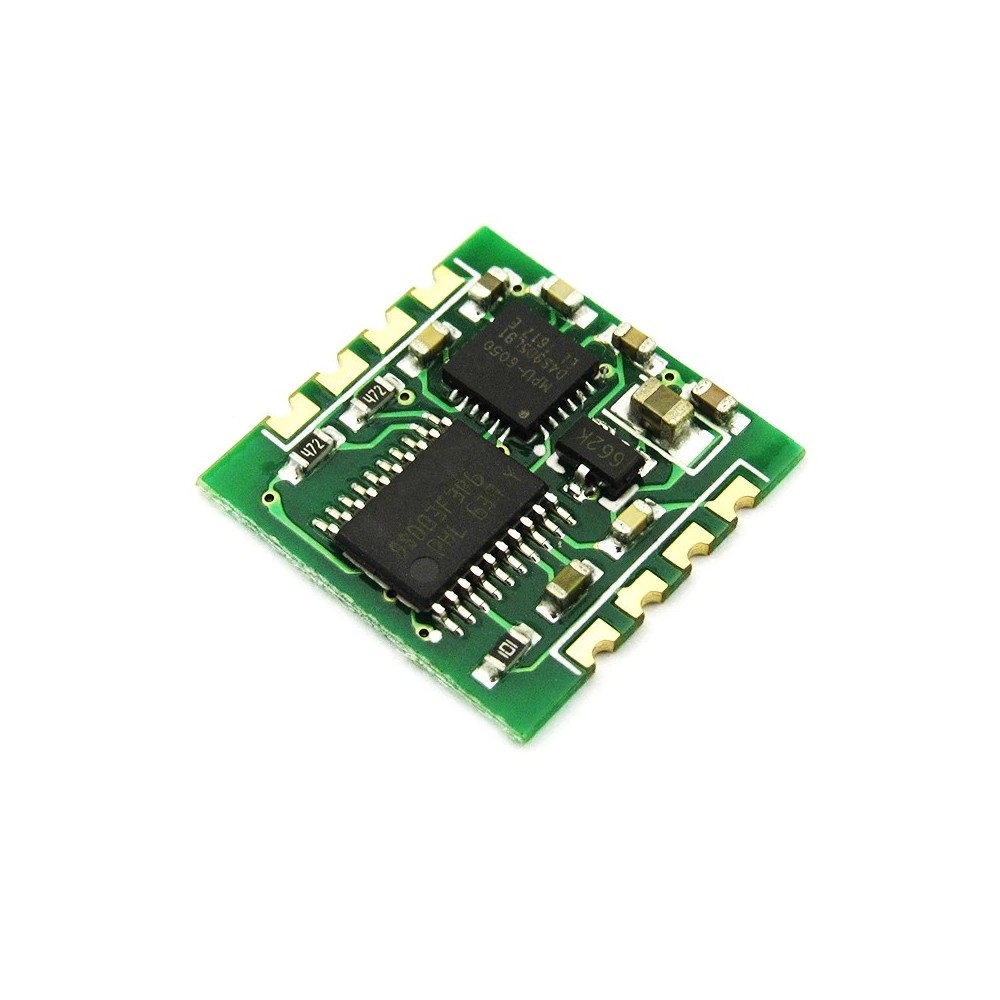
2. Using a high-precision gyro accelerometer MPU6050, the measurement data of MPU6050 is read through the processor and then output through the serial port, eliminating the need for users to develop the complicated I2C protocol of MPU6050.
3. The use of careful PCB layout and craftsmanship ensures that the MPU6050 receives the least external interference and the highest measurement accuracy.
4. The internal voltage stabilization circuit of the module is compatible with 3.3V/5V embedded system, and the connection is convenient.
5. The module retains the I2C interface of the MPU6050 to meet the needs of advanced users who wish to access the underlying measurement data.
6. The use of advanced digital filtering technology can effectively reduce measurement noise and improve measurement accuracy.
The stamp hole is gold-plated to ensure quality and can be embedded in the user's PCB board.
Module parameters:
1. Voltage: 3V~6V
2. Current: <10mA
3. Volume: 15.24mm X 15.24mm X 2mm
4. Pad spacing: up and down 100mil (2.54mm), left and right 600mil (15.24mm)
5. Measurement dimensions: acceleration: 3 dimensions, angular velocity: 3 dimensions, attitude angle: 3 dimensions
6. Range: acceleration: ±16g, angular velocity: ±2000°/s.
7. Resolution: acceleration: 6.1e-5g, angular velocity: 7.6e-3°/s.
8. Stability: acceleration: 0.001g, angular velocity 0.02°/s.
9. Stability of attitude measurement: 0.01°.
10. The data output frequency is 100Hz (115200 baud rate)/20Hz (9600 baud rate).
11. Data interface: serial port (TTL level), I2C (directly connected to MPU6050, no attitude output)
10. The baud rate is 115200kps/9600kps.
11. Provide sample code for MCU analysis.
1. The module integrates a posture solver, with a dynamic Kalman filter algorithm, can accurately output the current posture of the module in a dynamic environment, the posture measurement accuracy is 0.01 degrees, the stability is extremely high, and the performance is even better than some professional inclination angles. instrument!
2. Using a high-precision gyro accelerometer MPU6050, the measurement data of MPU6050 is read through the processor and then output through the serial port, eliminating the need for users to develop the complicated I2C protocol of MPU6050.
3. The use of careful PCB layout and craftsmanship ensures that the MPU6050 receives the least external interference and the highest measurement accuracy.
4. The internal voltage stabilization circuit of the module is compatible with 3.3V/5V embedded system, and the connection is convenient.
5. The module retains the I2C interface of the MPU6050 to meet the needs of advanced users who wish to access the underlying measurement data.
6. The use of advanced digital filtering technology can effectively reduce measurement noise and improve measurement accuracy.
The stamp hole is gold-plated to ensure quality and can be embedded in the user's PCB board.
Module parameters:
1. Voltage: 3V~6V
2. Current: <10mA
3. Volume: 15.24mm X 15.24mm X 2mm
4. Pad spacing: up and down 100mil (2.54mm), left and right 600mil (15.24mm)
5. Measurement dimensions: acceleration: 3 dimensions, angular velocity: 3 dimensions, attitude angle: 3 dimensions
6. Range: acceleration: ±16g, angular velocity: ±2000°/s.
7. Resolution: acceleration: 6.1e-5g, angular velocity: 7.6e-3°/s.
8. Stability: acceleration: 0.001g, angular velocity 0.02°/s.
9. Stability of attitude measurement: 0.01°.
10. The data output frequency is 100Hz (115200 baud rate)/20Hz (9600 baud rate).
11. Data interface: serial port (TTL level), I2C (directly connected to MPU6050, no attitude output)
10. The baud rate is 115200kps/9600kps.
11. Provide sample code for MCU analysis.

Szállításii feltételek

Biztonsági feltételek

Visszaküldési feltételek















