- -52%
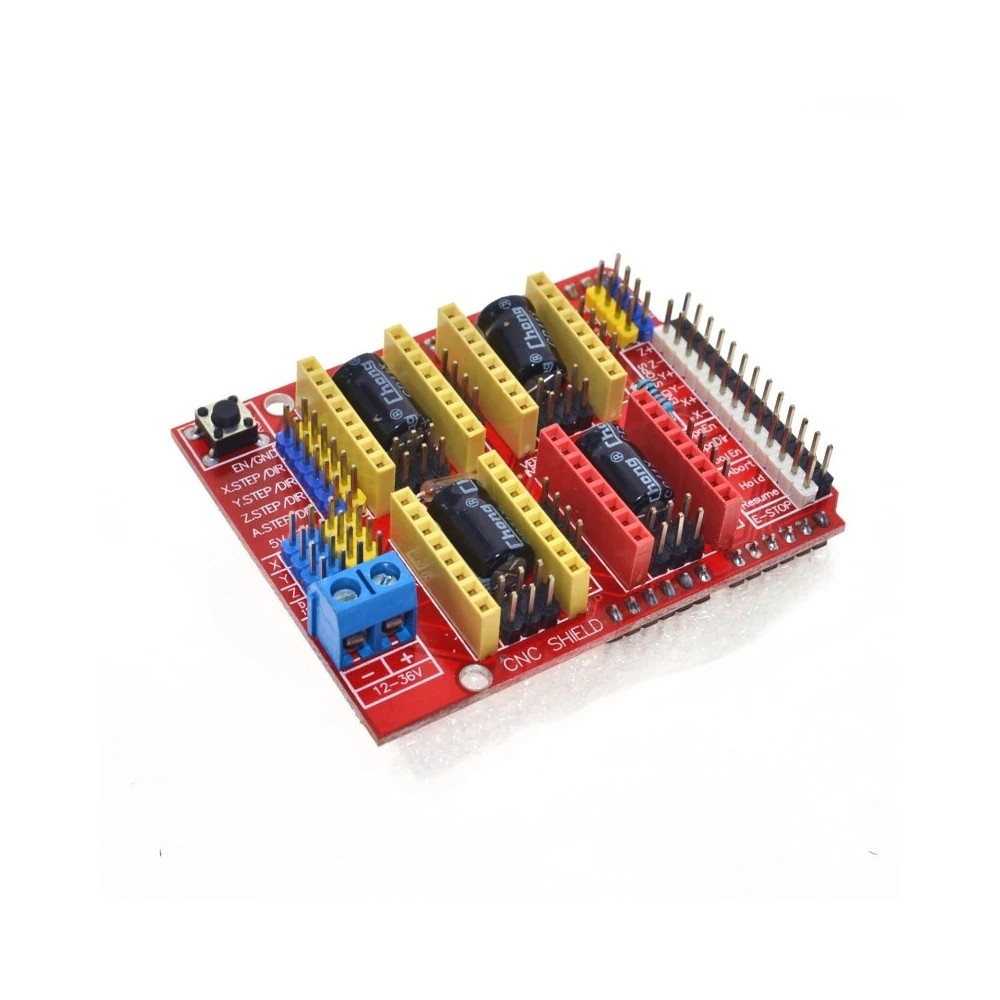






Új cnc shield v3 gravírozógép / 3D nyomtató / A4988 illesztőprogram-bővítő kártya Arduino-hoz
Új cnc shield v3 gravírozógép / 3D nyomtató / A4988 illesztőprogram-bővítő kártya Arduino-hoz
144 Ft
52% megtakarítás
301 Ft
Nincs adó
365
end
Notice: The new tracking number for CHINAL Post Ordinary Small Packet Plus can be traced only befor it arrive the airport of your country,please choose China Post Air Mail if you want a full tracking infoThe same product will arrive in 15 to 60 days
Tracking info of China Post Ordinary Small Packet Plus can be check here: www17tracknet/en
New cnc shield v3 engraving machine / 3D Printer / A4988 driver expansion board for Arduino Free shipping
II UNOAnd moduleIOCorrespondence between the introduction port
The basic needs of the stepper motor control other pins are in the engraving machine, or3DWhen the printer was used, here we do not make Detailed,IOIt corresponds to the above figure
Expansion board UNO ----------------------
8 ------------------------ EN (stepper motor drive enable, active low)
7----------------------- ZDIR (Z-axis direction control)
6----------------------- YDIR (Y-axis direction control)
5----------------------- XDIR (X-axis direction control)
4 ---------------------- ZSTEP (Z-axis stepper control)
3 ---------------------- YSTEP (Y-axis stepper control)
2 ---------------------- XSTEP (X-axis stepper control)
// Here is a simple stepper motor control procedures,
#define EN 8 // stepper motor enable, active low
#define X_DIR 5 // X axis stepper motor direction control
#define Y_DIR 6 // y-axis stepper motor direction control
#define Z_DIR 7 // z-axis stepper motor direction control
#define X_STP 2 // x-axis stepper control
#define Y_STP 3 // y-axis stepper control
#define Z_STP 4 // z-axis stepper control
/ *
// Function: step function: to control the stepper motor direction, the number of steps
// Parameters: dir direction control, dirPin DIR pin corresponding to the stepper motor, stepperPin step pin corresponding to the stepper motor, stepping a few steps steps
// No return value
* /
void step (boolean dir, byte dirPin, byte stepperPin, int steps)
{
digitalWrite (dirPin, dir);
delay (50);
for (int i = 0; i
digitalWrite (stepperPin, HIGH);
delayMicroseconds (800);
digitalWrite (stepperPin, LOW);
delayMicroseconds (800);
}
}
void setup () {// the stepping motor used in the IO pin is set to output
pinMode (X_DIR, OUTPUT); pinMode (X_STP, OUTPUT);
pinMode (Y_DIR, OUTPUT); pinMode (Y_STP, OUTPUT);
pinMode (Z_DIR, OUTPUT); pinMode (Z_STP, OUTPUT);
pinMode (EN, OUTPUT);
digitalWrite (EN, LOW);
}
void loop () {
step (false, X_DIR, X_STP, 200); // X axis motor reversal lap, 200 steps for the circle
step (false, Y_DIR, Y_STP, 200); // y-axis motor reversal lap, 200 steps for the circle
step (false, Z_DIR, Z_STP, 200); // z-axis motor reversal lap, 200 steps for the circle
delay (1000);
step (true, X_DIR, X_STP, 200); // X-axis motor is transferred lap, 200 steps to circle
step (true, Y_DIR, Y_STP, 200); // y-axis motor is transferred lap, 200 steps to circle
step (true, Z_DIR, Z_STP, 200); // z-axis motor is transferred lap, 200 steps to circle
delay (1000);
}
end
Notice: The new tracking number for CHINAL Post Ordinary Small Packet Plus can be traced only befor it arrive the airport of your country,please choose China Post Air Mail if you want a full tracking infoThe same product will arrive in 15 to 60 days
Tracking info of China Post Ordinary Small Packet Plus can be check here: www17tracknet/en
New cnc shield v3 engraving machine / 3D Printer / A4988 driver expansion board for Arduino Free shipping
II UNOAnd moduleIOCorrespondence between the introduction port
The basic needs of the stepper motor control other pins are in the engraving machine, or3DWhen the printer was used, here we do not make Detailed,IOIt corresponds to the above figure
Expansion board UNO ----------------------
8 ------------------------ EN (stepper motor drive enable, active low)
7----------------------- ZDIR (Z-axis direction control)
6----------------------- YDIR (Y-axis direction control)
5----------------------- XDIR (X-axis direction control)
4 ---------------------- ZSTEP (Z-axis stepper control)
3 ---------------------- YSTEP (Y-axis stepper control)
2 ---------------------- XSTEP (X-axis stepper control)
// Here is a simple stepper motor control procedures,
#define EN 8 // stepper motor enable, active low
#define X_DIR 5 // X axis stepper motor direction control
#define Y_DIR 6 // y-axis stepper motor direction control
#define Z_DIR 7 // z-axis stepper motor direction control
#define X_STP 2 // x-axis stepper control
#define Y_STP 3 // y-axis stepper control
#define Z_STP 4 // z-axis stepper control
/ *
// Function: step function: to control the stepper motor direction, the number of steps
// Parameters: dir direction control, dirPin DIR pin corresponding to the stepper motor, stepperPin step pin corresponding to the stepper motor, stepping a few steps steps
// No return value
* /
void step (boolean dir, byte dirPin, byte stepperPin, int steps)
{
digitalWrite (dirPin, dir);
delay (50);
for (int i = 0; i
digitalWrite (stepperPin, HIGH);
delayMicroseconds (800);
digitalWrite (stepperPin, LOW);
delayMicroseconds (800);
}
}
void setup () {// the stepping motor used in the IO pin is set to output
pinMode (X_DIR, OUTPUT); pinMode (X_STP, OUTPUT);
pinMode (Y_DIR, OUTPUT); pinMode (Y_STP, OUTPUT);
pinMode (Z_DIR, OUTPUT); pinMode (Z_STP, OUTPUT);
pinMode (EN, OUTPUT);
digitalWrite (EN, LOW);
}
void loop () {
step (false, X_DIR, X_STP, 200); // X axis motor reversal lap, 200 steps for the circle
step (false, Y_DIR, Y_STP, 200); // y-axis motor reversal lap, 200 steps for the circle
step (false, Z_DIR, Z_STP, 200); // z-axis motor reversal lap, 200 steps for the circle
delay (1000);
step (true, X_DIR, X_STP, 200); // X-axis motor is transferred lap, 200 steps to circle
step (true, Y_DIR, Y_STP, 200); // y-axis motor is transferred lap, 200 steps to circle
step (true, Z_DIR, Z_STP, 200); // z-axis motor is transferred lap, 200 steps to circle
delay (1000);
}

Szállításii feltételek

Biztonsági feltételek

Visszaküldési feltételek